вологість:
тиск:
вітер:
Інженери створили найменшого у світі бездротового літаючого робота
18 квітня 2025 р. 07:21





18 квітня 2025 р. 07:21
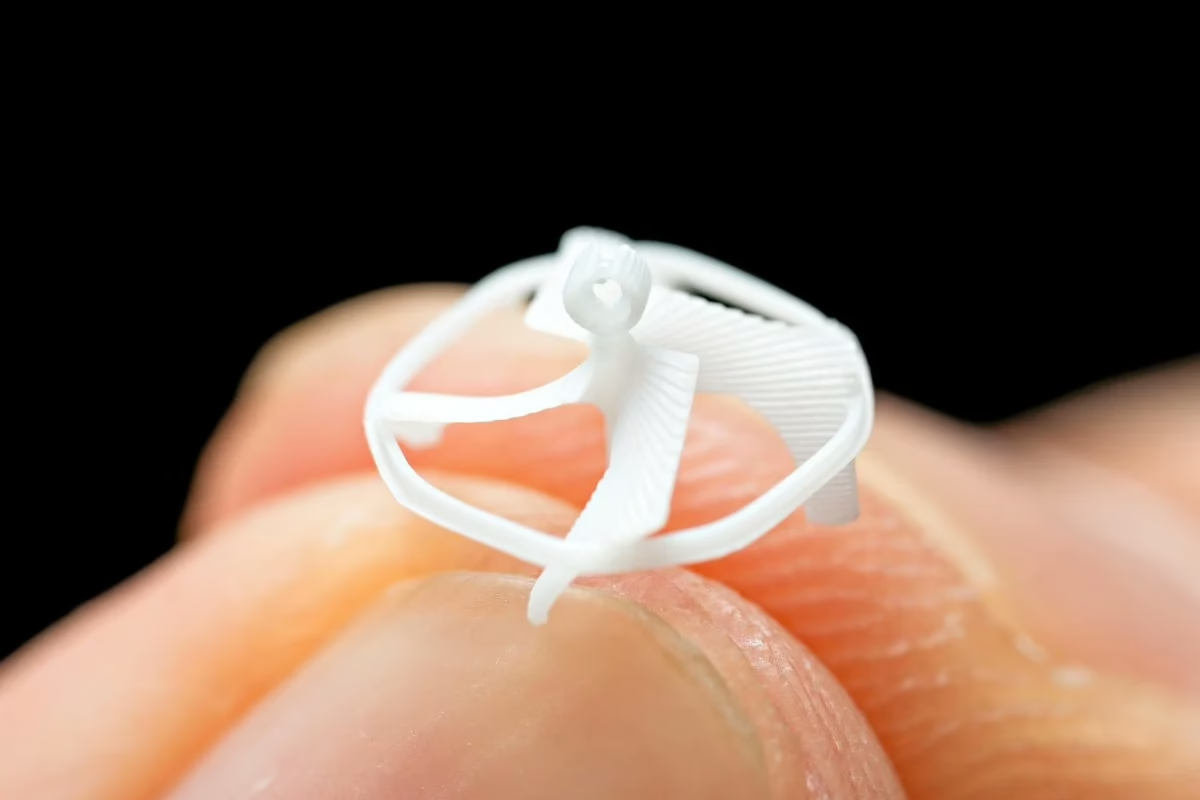
Як і джміль, що перелітає з квітки на квітку, новий робот, натхненний комахами та розроблений інженерами Каліфорнійського університету в Берклі, здатен зависати в повітрі, змінювати напрямок польоту та точно влучати в невеликі цілі. З розміром менш ніж 1 сантиметр і вагою лише 21 міліграм, це найменший у світі бездротовий робот, який здатен здійснювати керований політ.
«Джмелі мають неймовірні аеродинамічні здібності, зокрема навігацію, зависання в повітрі та запилення — все те, на що штучні літаючі роботи такого масштабу досі не здатні», — каже професор машинобудування Лівей Лінь із UC Berkeley. «Цей літаючий робот можна бездротово керувати для наближення та влучання в ціль, імітуючи механізм запилення, коли джміль збирає нектар і відлітає».
Лінь — головний автор нового наукового дослідження, опублікованого 28 березня в журналі Science Advances .
Магнітна тяга забезпечує мініатюрний політ
Щоб літати, робот зазвичай потребує джерела живлення, такого як батарея, та електроніки для контролю руху. Але втиснути все це в надлегкий мікропристрій — справжній виклик. Щоб обійти цю проблему, команда Ліня використала зовнішнє магнітне поле, яке одночасно забезпечує енергію та керує траєкторією польоту.
Робот має форму маленького пропелера з двома магнітами. Під впливом зовнішнього магнітного поля магніти притягуються й відштовхуються, змушуючи пропелер обертатись і створюючи достатню підйомну силу, щоб підняти пристрій у повітря. Траєкторія польоту контролюється зміною сили магнітного поля. Попередній найближчий за розмірами робот із подібними можливостями мав діаметр 2,8 см — майже втричі більший за новий пристрій.
Малий масштаб — великі можливості
«Крихітні літаючі роботи корисні для дослідження вузьких отворів або складних середовищ», — зазначає Фанпін Суї, один зі співавторів дослідження. «Їх можна використати для штучного запилення чи інспекції труб або інших важкодоступних місць».
Наразі робот має лише пасивний контроль польоту — тобто, він не оснащений сенсорами положення чи навігації і не може реагувати на зміни середовища в реальному часі. Наприклад, сильний порив вітру може вивести його з курсу.
Майбутнє — розумні й рої подібні роботи
Робот вимагає досить сильного магнітного поля, яке забезпечується спеціальною електромагнітною котушкою. Але в майбутньому його можна буде ще більше зменшити — до менше ніж 1 мм у діаметрі (розміром із мошку), що дозволить керувати ним слабшими магнітними полями, наприклад, від радіохвиль.
Окрім джмелеподібного робота, команда Ліня також створила робота, схожого на таргана, який може бігати по поверхні й витримує наступ людини. Тим часом аспірант Вей Юе працює над «роєвими» роботами, які можуть діяти як група — подібно до мурах.
«Я працюю з 5-міліметровими роботами, які можуть повзати, обертатись, з’єднуватись у ланцюги або сітки для виконання складніших завдань», — розповідає Юе. «Їх можна потенційно застосувати в малоінвазивній хірургії: ввести в тіло кілька таких роботів, які зможуть спільно формувати стенти, знищувати тромби або виконувати інші завдання».
 Джерело: portaltele.com.ua (Технології)
Джерело: portaltele.com.ua (Технології)
Новини рубріки

Літаючий Райнхардт та міні-Боб у Еш: в Overwatch 2 скоро стартує божевільний режим "Стадіон"
20 квітня 2025 р. 10:16

Запущено на воду найбільша плавучу рибну ферму
20 квітня 2025 р. 08:53