вологість:
тиск:
вітер:
Марсіанська «кам’яна павутина» може переписати геологічну історію Марса
22 травня 2025 р. 18:48





22 травня 2025 р. 18:48
«К’юріосіті» досяг місця, багатого на хребти, яке може бути марсіанським варіантом коробкової структури, але розташоване на ньому колесо завадило ретельному аналізу. Натомість ровер запустив набір камер і датчиків, щоб задокументувати дивне нове оточення, готуючись до повернення в п’ятницю.
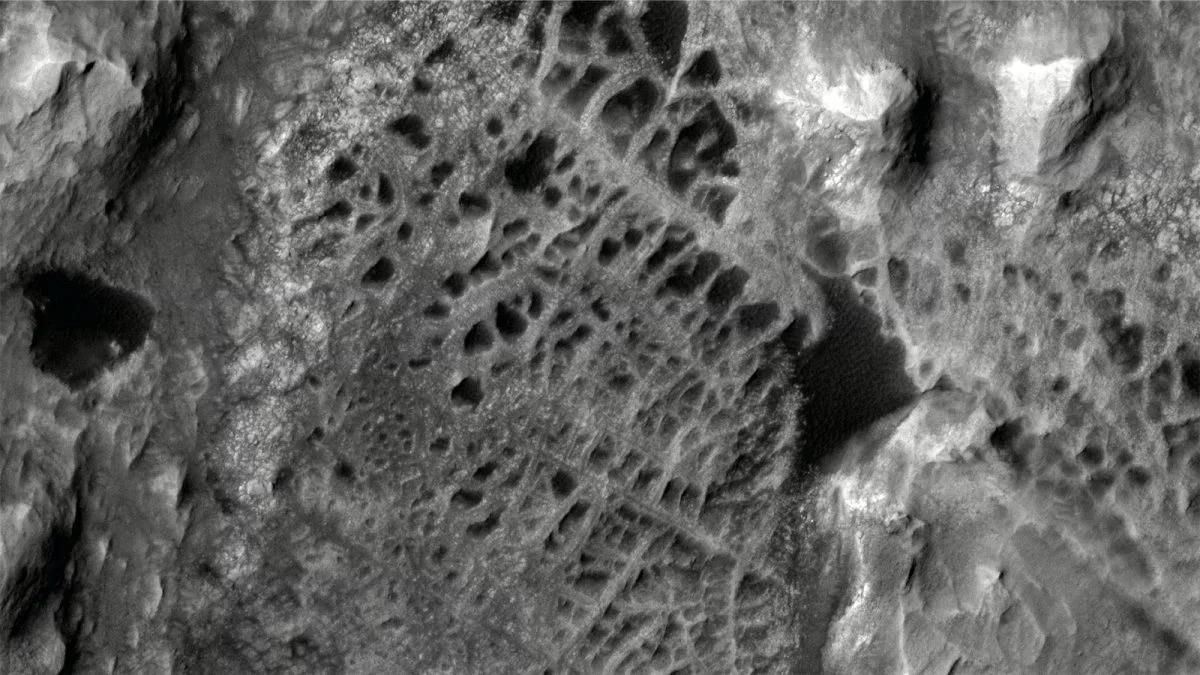
Цікавість зацікавила ще одну захопливу частину Марса, і ця, можливо, найцікавіша з усіх. Ми зараз на межі того, що може бути коробкоподібною структурою — вражаючим візерунком із жорстких, схожих на павутину хребтів, вперше побачених з орбіти (див. зображення нижче). Відтоді, як ми помітили це на супутникових знімках, ми прагнули дослідити це зблизька.
Ці перші спостереження знаменують собою початок дослідження. Ми прагнемо з’ясувати, чи справді ці хребти, особливо той, що помітний перед нами, належать до коробчастої формації. Але є невелика проблема: одне з передніх коліс Curiosity спирається на гальку, і рух роботизованої руки зараз може призвести до зісковзування. Тож замість того, щоб використовувати руку, ми фіксуємо якомога більше наукових даних дистанційно та обережно перемістимо марсохід для ближчого розгляду пізніше цього тижня.
Перш ніж ми рушимо, Curiosity використовує свою потужну камеру Mastcam, щоб зробити розгорнуту мозаїку ландшафту навколо. Ці ширококутні зображення допомагають нам відстежувати, як змінюється рельєф з висотою вздовж шляху марсохода. Mastcam також детальніше розгляне «Хребет Темблор» – сусідній хребет, який ми раніше перетинали – там все ще видно сліди наших коліс.
Далі Mastcam сфотографує жолоб, подібний до інших, які ми бачили в цьому районі. Ці утворення особливо цікаві, оскільки їхнє походження досі невідоме. Він також повторно зобразить ціль AEGIS, обрану в попередньому плані.
Тим часом прилад ChemCam випромінює свій лазер на скелястий пік під назвою «Пік Глендейл», що є частиною потенційного коробчастого хребта. Він також знімає мозаїку Тексолі-Бьютт високої роздільної здатності. Після цього Mastcam повернеться назад, щоб також зробити детальні фотографії піку Глендейл.
Паралельно з усіма процесами візуалізації ми щомісяця тестуємо та обслуговуємо резервний насос для Системи відведення тепла (HRS). HRS – це рідинний контур, який розподіляє тепло від джерела живлення марсохода, допомагаючи підтримувати температуру всіх підсистем у межах прийнятних значень. Нам потрібно періодично перевіряти його справність, про всяк випадок, якщо у нашого основного насоса виникнуть проблеми.
Після завершення всіх знімків марсохід відскочить назад на 30 сантиметрів (близько 12 дюймів), щоб спуститися з гальки та розмістити цікаві наукові об’єкти в робочому просторі маніпулятора. Це має забезпечити нам позицію, з якої можна безпечно розпакувати маніпулятор і покласти інструменти на поверхню.
На другому, нецільовому солі плану, у нас є деякі додаткові дані про атмосферу, включаючи велике дослідження пилового диявола, а також надгоризонтне відео Navcam та сонячне тау-весеління Mastcam для вимірювання пилу в атмосфері. Ми завершуємо ще одним автономним націлюванням ChemCam за допомогою AEGI. Джерело
 Джерело: portaltele.com.ua (Космос)
Джерело: portaltele.com.ua (Космос)
Новини рубріки
Сонячні солі випробують на стійкість до радіації
22 травня 2025 р. 19:01
У США створили магнітну решітку, що зменшує витрати на 80%
22 травня 2025 р. 19:01
Сполука з енергетиків і м’яса пришвидшила ріст клітин раку крові
22 травня 2025 р. 17:25